
我最近在用Sawyer机器人做实验,用rosbag记录了机器人状态数据,后续要进行可视化和分析,虽然ROS内置rqt_plot有绘图功能,但是rqt_plot的功能比较简单,数据量大的时候查看起来也比较麻烦,还是导入进Matlab分析更好一些。
Matlab可以直接读取rosbag数据,对于ROS自带的topic信息,比如 /joint_states 和 /cmd_vel,用Matlab读取很方便。但是对于使用了自定义的message类型的topic,需要重新编译存放msg文件的ROS package,这一步骤在Matlab中使用rosgenmsg命令完成,借助Matlab的java接口,Matlab就能识别自定义的message了。
我的Matlab版本是R2021a,需要注意的是在R2020b版本中Matlab对ROS功能的支持做了很大改动,rosgenmsg 直接包含在了toolbox中(不需要额外的support package),网上有的教程写需要通过roboticsAddons命令安装插件,应该用的是R2020b之前的Matlab版本。以后可以直接看这份官方文档:ROS Custom Message Support,具体操作跟着文档走即可,这里主要是记录一下需要注意的地方。
更新Cmake版本
Cmake版本要确保在3.15.5或以上,在Matlab官方文档ROS System Requirements也可以查到。
检查你目前的Cmake版本:1
cmake --version
如果版本低于3.15.5则需要更新,最常见的想法可能是直接在Linux终端用sudo apt-get install cmake安装,但是安装完发现是低于要求的版本,比如我用的Ubuntu 16.04,只能得到3.5.1,用sudo apt-get install cmake安装不了最新版本的原因是操作系统本身的repositories没有更新,16.04是Ubuntu的长期支持(LTS)版本,要在5年内保持稳定,一般只会进行关键或者安全方面的更新,不会经常主动更新最新版本的packages,通常每6个月才会更新一次。
推荐安装方法如下:
- 卸载Ubuntu提供的默认版本:或者
1
sudo apt remove --purge --auto-remove cmake
1
sudo apt purge --auto-remove cmake
- 去CMake官网下载界面,查看Cmake版本号,确定要安装的版本(修改version和build变量到需要的版本号,下例:3.19.1):
1
2version=3.19
build=1 - 先新建一个文件夹temp来存放cmake源码包,然后获取cmake源码包:
1
2
3mkdir ~/temp
cd ~/temp
wget https://cmake.org/files/v$version/cmake-$version.$build.tar.gz - 解压源码包:
1
tar -xzvf cmake-$version.$build.tar.gz
- 进入解压后的cmake目录:
1
cd cmake-$version.$build/
安装cmake:
1
2
3./bootstrap
make -j$(nproc)
sudo make installNote:
- 因为我的是多核CPU,这里使用了
make -j$(nproc)命令进行并行编译,不过直接用make出问题的概率小一点,nproc资料可以看这里 make install命令需要root privilege
- 因为我的是多核CPU,这里使用了
最后,打开一个新终端,检查Cmake版本:
1
cmake --version
Note:
cmake --version要在新终端才有用,因为用上面的方法Cmake会默认安装在/usr/local/bin/,而如果用开始提到的sudo apt-get install cmake安装,默认安装路径会是/usr/bin/,原因可以看StackExchange上这个回答:/usr/local/binis for normal user programs not managed by the distribution package manager, e.g. locally compiled packages. You should not install them into/usr/binbecause future distribution upgrades may modify or delete them without warning.
cmake --version运行的结果:1
2
3cmake version 3.19.1
CMake suite maintained and supported by Kitware (kitware.com/cmake).
确认Cmake路径
更新好Cmake版本后,为了确保Cmake在Matlab中可用,需要保证Cmake在Matlab的环境变量中:
- 首先在Linux终端中查看Cmake路径,上面已经提过Cmake会默认安装在
/usr/local/bin/,可以在终端查看:运行结果:1
which cmake
1
/usr/local/bin/cmake
- 然后打开Mtalab,命令行运行:运行结果应该和前面Linux终端查到的路径一致:
1
!which cmake
1
/usr/local/bin/cmake
- 最后也在Matlab查看一下Cmake版本:运行结果应和前面Linux终端查到版本号一致:
1
!cmake --version
1
2
3cmake version 3.19.1
CMake suite maintained and supported by Kitware (kitware.com/cmake).
编译自定义message
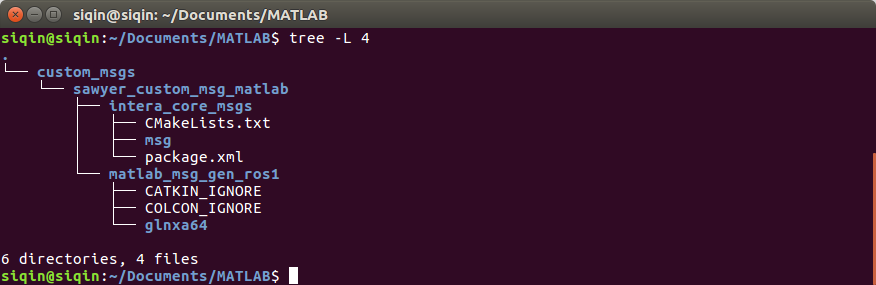
这里用Sawyer提供的ROS packageintera_core_msgs举例,自定义的message文件就在msg里面。我先建了一个文件夹custom_msgs,然后在里面再建个文件夹sawyer_custom_msg_matlab包含这个package,以后有其他package也可以放到这个文件夹里面。intera_core_msgspackage我是直接从Github上复制进来的,里面已经生成且配置好CmakeLists.txt和package.xml文件了,如果你想自己create ROS package也可以,注意别忘了修改这两个文件。后面的matlab_msg_gen_ros1文件夹就是用Matlab编译生成的,下面会演示。
Note
- 因为只要用到msg,我复制
intera_core_msgspackage时没有复制srv,需要的时候再加进去。- 目前不支持ROS actions,在自定义message生成期间将被忽略。
接下来就可以在Matlab里面用rosgenmsg命令编译了:
- 声明自定义message所在ROS package的路径:运行结果:
1
sawyer_folder = '/home/siqin/Documents/MATLAB/custom_msgs/sawyer_custom_msg_matlab'
1
2
3sawyer_folder =
'/home/siqin/Documents/MATLAB/custom_msgs/sawyer_custom_msg_matlab' - Call rosgenmsg:运行结果:
1
rosgenmsg(sawyer_folder)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22Identifying message files in folder '/home/siqin/Documents/MATLAB/custom_msgs/sawyer_custom_msg_matlab'..Done.
Validating message files in folder '/home/siqin/Documents/MATLAB/custom_msgs/sawyer_custom_msg_matlab'..Done.
[1/1] Generating MATLAB interfaces for custom message packages... Done.
Running catkin build in folder '/home/siqin/Documents/MATLAB/custom_msgs/sawyer_custom_msg_matlab/matlab_msg_gen_ros1/glnxa64'.
Build in progress. This may take several minutes...
Build succeeded.build log
To use the custom messages, follow these steps:
1. Add the custom message folder to the MATLAB path by executing:
addpath('/home/siqin/Documents/MATLAB/custom_msgs/sawyer_custom_msg_matlab/matlab_msg_gen_ros1/glnxa64/install/m')
savepath
2. Refresh all message class definitions, which requires clearing the workspace, by executing:
clear classes
rehash toolboxcache
3. Verify that you can use the custom messages.
Enter "rosmsg list" and ensure that the output contains the generated
custom message types. - 然后按照上面的提示说明加入环境变量,清理一下工作空间就可以了,逐条运行:
1
2
3
4addpath('/home/siqin/Documents/MATLAB/custom_msgs/sawyer_custom_msg_matlab/matlab_msg_gen_ros1/glnxa64/install/m')
savepath
clear classes
rehash toolboxcacheNote
执行savepath时如果提示无法修改Matlab路径文件的话,有两种解决方法:- 第一种:在当前Matlab命令窗口修改权限:
查看pathdef路径:运行结果:1
which pathdef
修改成所有user都有读和写的权限:1
/usr/local/MATLAB/R2021a/toolbox/local/pathdef.m
1
sudo chmod 666 /usr/local/MATLAB/R2018a/toolbox/local/pathdef.m
- 第二种:在Linux终端用
sudo matlab重新打开Matlab
- 第一种:在当前Matlab命令窗口修改权限:
最后用查看自定义的message types是否被成功生成:1
rosmsg list
可以发现intera_core_msgspackage下msg文件夹里面的所有自定义message都已被成功生成:1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35intera_core_msgs/AnalogIOState
intera_core_msgs/AnalogIOStates
intera_core_msgs/AnalogOutputCommand
intera_core_msgs/CameraControl
intera_core_msgs/CameraSettings
intera_core_msgs/CollisionAvoidanceState
intera_core_msgs/CollisionDetectionState
intera_core_msgs/DigitalIOState
intera_core_msgs/DigitalIOStates
intera_core_msgs/DigitalOutputCommand
intera_core_msgs/EndpointNamesArray
intera_core_msgs/EndpointState
intera_core_msgs/EndpointStates
intera_core_msgs/HeadPanCommand
intera_core_msgs/HeadState
intera_core_msgs/HomingCommand
intera_core_msgs/HomingState
intera_core_msgs/IOComponentCommand
intera_core_msgs/IOComponentConfiguration
intera_core_msgs/IOComponentStatus
intera_core_msgs/IODataStatus
intera_core_msgs/IODeviceConfiguration
intera_core_msgs/IODeviceStatus
intera_core_msgs/IONodeConfiguration
intera_core_msgs/IONodeStatus
intera_core_msgs/IOStatus
intera_core_msgs/InteractionControlCommand
intera_core_msgs/InteractionControlState
intera_core_msgs/JointCommand
intera_core_msgs/JointLimits
intera_core_msgs/NavigatorState
intera_core_msgs/NavigatorStates
intera_core_msgs/RobotAssemblyState
intera_core_msgs/SEAJointState
intera_core_msgs/URDFConfiguration
rosbag数据处理
接下来以intera_core_msgs/EndpointState这个自定义message为例,用Matlab处理rosbag记录的机器人数据。
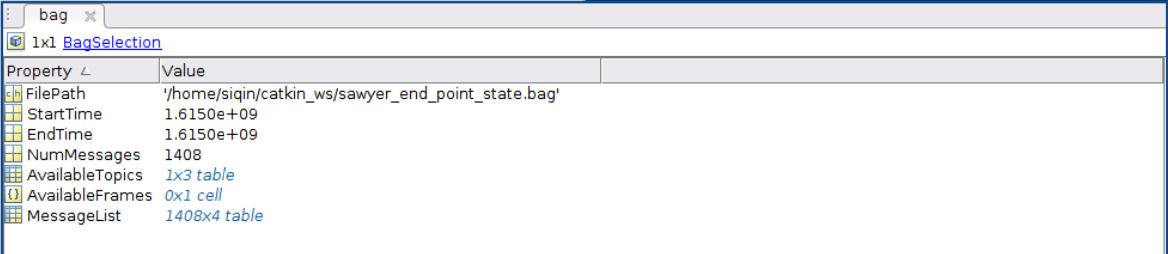
- bag文件读取: 运行后点击Workspace的bag变量,得到如下图所示信息:
1
bag = rosbag('/home/siqin/catkin_ws/sawyer_end_point_state.bag');
选择Topic
点击上图中的AvaliableTopics查看记录有哪些Topic,我这里只记录了一个/robot/limb/right/endpoint_state,如下图所示: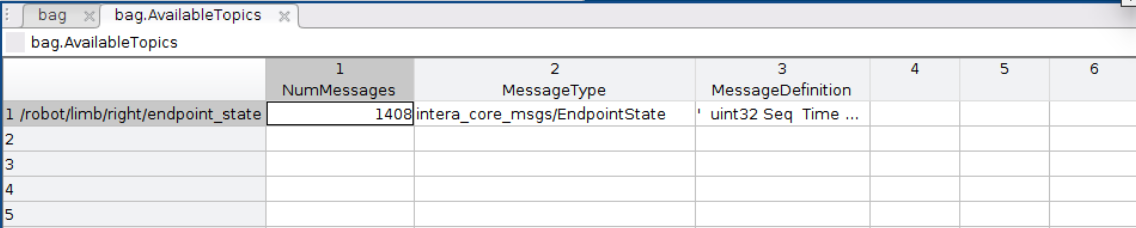
查看topic之后利用
select函数选择需要处理的Topic名称:1
state_select = select(bag, 'Time',[bag.StartTime bag.EndTime], 'Topic', '/robot/limb/right/endpoint_state');
从上图还可以注意到MessageType列中的
intera_core_msgs/EndpointState正是我们之前自定义的message。利用
readMessages函数读取select函数选择的数据1
stateMsgs = readMessages(state_select);
运行后点击Workspace的stateMsgs变量,得到如下图所示信息:
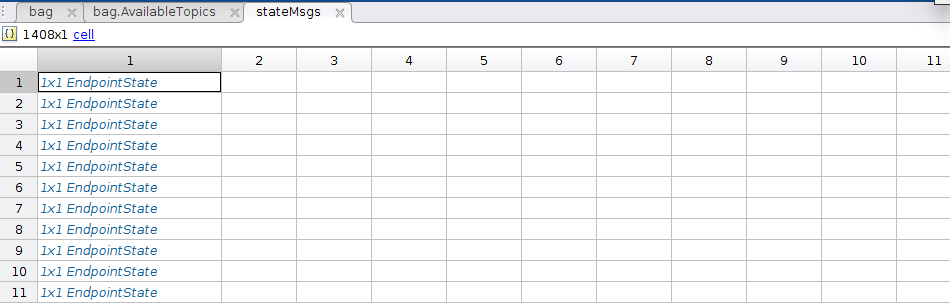
可以看到stateMsgs是一个1408x1的array,包含了记录的1408条message数据,点击第一条看看:

上图显示的是定义
intera_core_msgs/EndpointState的数据结构,我们可以先在Linux终端看一下具体内容:1
rosmsg show intera_core_msgs/EndpointState
运行结果:
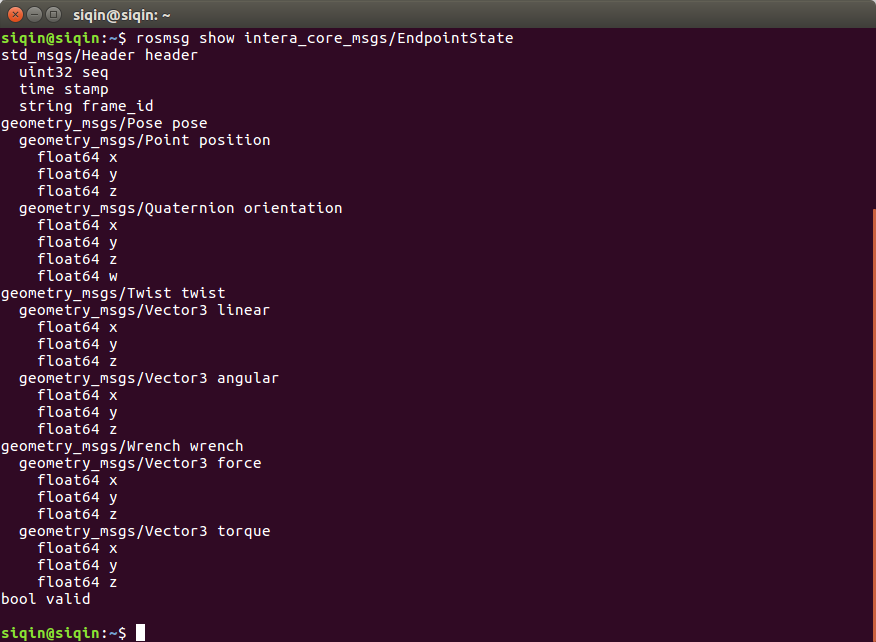
可以看到
intera_core_msgs/EndpointState使用了std_msgs和geometry_msgs两种ROS自带的message来定义,主要包含了机器人TCP的以下信息:pose(位姿):
- positon 位置: x y z坐标
- orinentation 姿态: 用四元数表示
twist(旋量,6维向量):
- linear: 沿轴的线速度,3维向量
- angular: 绕轴的角速度 3维向量
wrench(旋量,6维向量):
- force: 力,3维向量
- torque: 力矩,3维向量
Note: 四元数和旋量理论后面有空单独写几篇讨论
以pose中的position为例:点击上图stateMsgs中的1x1 Pose,得到如下图所示信息:

可以看到Pose包含了positon和orinentation信息,点开positon:

positon包含了机器人TCP的x y z坐标,与在终端查看的结果一致,点开X的信息:

Note:
图中每个tab的名称代表的是当前数据的读取方式,比如stateMsg{1,1}.Pose.Position.X表示的是X的读取方式。接下来可视化数据,建立一个三维数组,将所有position数据读入数组:
1
2
3
4
5
6TCP_position=zeros(1408,3);
for i=1:1408
TCP_position(i,1)=stateMsgs{i,1}.Pose.Position.X;
TCP_position(i,2)=stateMsgs{i,1}.Pose.Position.Y;
TCP_position(i,3)=stateMsgs{i,1}.Pose.Position.Z;
end绘制轨迹图:
1
2
3
4
5
6
7
8
9
10
11
12figure;
for i=1:3
plot((1:1408),TCP_position(:,i),'LineWidth',1.5);
hold on;
end
xlabel('seq');
title('Position of End Point');
grid on;
legend('Position.X','Position.Y','Position.Z');
figure;
comet3(position(:,1),position(:,2),position(:,3),0.5);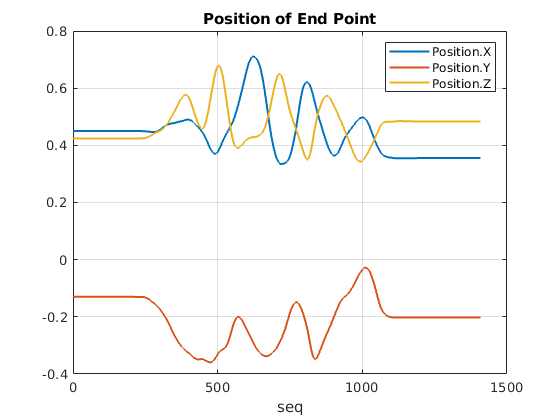
完整Matlab代码:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63clear all;
close all;
clc;
bag = rosbag('/home/siqin/catkin_ws/sawyer_end_point_state.bag');
state_select = select(bag, 'Time',[bag.StartTime bag.EndTime], 'Topic', '/robot/limb/right/endpoint_state');% {'intera_core_msgs/EndpointState'}
stateMsgs = readMessages(state_select);
% rosmsg show intera_core_msgs/EndpointState
% std_msgs/Header header
% uint32 seq
% time stamp
% string frame_id
% geometry_msgs/Pose pose
% geometry_msgs/Point position
% float64 x
% float64 y
% float64 z
% geometry_msgs/Quaternion orientation
% float64 x
% float64 y
% float64 z
% float64 w
% geometry_msgs/Twist twist
% geometry_msgs/Vector3 linear
% float64 x
% float64 y
% float64 z
% geometry_msgs/Vector3 angular
% float64 x
% float64 y
% float64 z
% geometry_msgs/Wrench wrench
% geometry_msgs/Vector3 force
% float64 x
% float64 y
% float64 z
% geometry_msgs/Vector3 torque
% float64 x
% float64 y
% float64 z
% bool valid
TCP_position=zeros(1408,3);
for i=1:1408
TCP_position(i,1)=stateMsgs{i,1}.Pose.Position.X;
TCP_position(i,2)=stateMsgs{i,1}.Pose.Position.Y;
TCP_position(i,3)=stateMsgs{i,1}.Pose.Position.Z;
end
figure;
for i=1:3
plot((1:1408),TCP_position(:,i),'LineWidth',1.5);
hold on;
end
xlabel('seq');
title('Position of End Point');
grid on;
legend('Position.X','Position.Y','Position.Z');
figure;
comet3(TCP_position(:,1),TCP_position(:,2),TCP_position(:,3),0.5);
References
[1] https://www.mathworks.com/help/ros/ug/ros-custom-message-support.html
[2] https://askubuntu.com/questions/355565/how-do-i-install-the-latest-version-of-cmake-from-the-command-line
[3] https://www.mathworks.com/matlabcentral/answers/623103-matlab-2020b-rosgenmsg-can-t-find-cmake
[4] https://blog.csdn.net/yaked/article/details/97682872
[5] https://blog.csdn.net/weixin_40712763/article/details/78909608
[6] https://blog.csdn.net/u012424737/article/details/106766307